根据传感器的作用分,一般传感器分为:
内部传感器(体内传感器):主要测量机器人内部系统,比如温度,电机速度,电机载荷,电池电压等。
外部传感器(外界传感器):主要测量外界环境,比如距离测量,声音,光线。
根据传感器的运行方式,可以分为:
被动式传感器:传感器本身不发出能量,比如CCD,CMOS摄像头传感器,靠捕获外界光线来获得信息。
主动式传感器:传感器会发出探测信号。比如超声波,红外,激光。但是此类传感器的反射信号会受到很多物质的影响,从而影响准确的信号获得。同时,信号还狠容易受到干扰,比如相邻两个机器人都发出超声波,这些信号就会产生干扰。
传感器一般有以下几个指标:
动态范围:是指传感器能检测的范围。比如电流传感器能够测量1mA-20A的电流,那么这个传感器的测量范围就是10log(20/0.001)=43dB. 如果传感器的输入超出了传感器的测量范围,那么传感器就不会显示正确的测量值了。比如超声波传感器对近距离的物体无法测量。
分辨率:分辨率是指传感器能测量的最小差异。比如电流传感器,它的分辨率可能是5mA,也就是说小于5mA的电流差异,它没法检测出。当然越高分辨率的传感器价格就越贵。
线性度:这是一个非常重要的指标来衡量传感器输入和输出的关系。
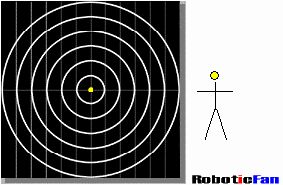
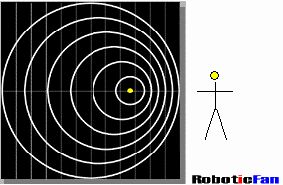
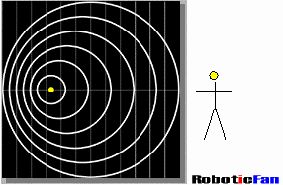
频率:是指传感器的采样速度。比如一个超声波传感器的采样速度为20HZ,也就是说每秒钟能扫描20次。
下面介绍一下常用的传感器:
编码器:主要用于测量电机的旋转角度和速度。任何用电机的地方,都可以用编码器来作为传感器来获得电机的输出。
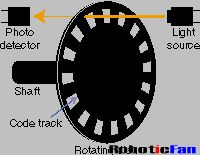
光电编码器的原理
电子罗盘:可以检测机器人与地球南北极之间的角度,从而获得机器人的朝向。但是精度很低。而且任何磁性物体都会造成罗盘失灵,比如扬声器。所以要配合其它传感器,比如编码器一起使用才能获得比较好的定位效果。主要有hall-effect和flux-gate两种:
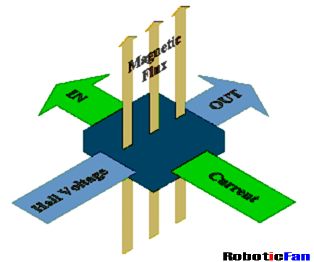
Hall-Effect 原理的电子罗盘
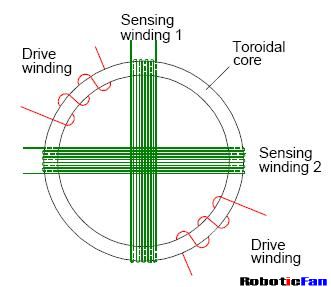
Flux-gate 原理的电子罗盘
陀螺仪:又分机械陀螺仪和光电陀螺仪。可以检测绝对朝向。但是目前价格过高,只在飞机上采用。目前最好的光电陀螺仪能提供100KHz的采样频率,同时提供0.0001degress/hr的分辨率。但是价格也是同样昂贵。
GPS系统:这个相比不需要太多的解释。GPS系统分为标准GPS和差分GPS系统。标准GPS系统能提供15m的误差定位,而差分GPS系统能提供高达1m内误差的定位。如果再考虑相位差信号的话,最新的GPS设备能提供精确到10cm的定位坐标。怪不得美国人现在的导弹精确度如此之高。

差分GPS系统(DGPS)